今の仕事で、サーボドライバに外部速度設定器(ボリューム)を2つ取り付けて制御しましたが、意外と苦労したので報告します。
速度設定方法
ボリュームによる速度司令は、電圧を-10V〜+10Vの範囲で設定し速度を統制します。この装置は正転時にボリューム1を使用し、逆転時にボリューム2を使用するように切替えて制御しています。
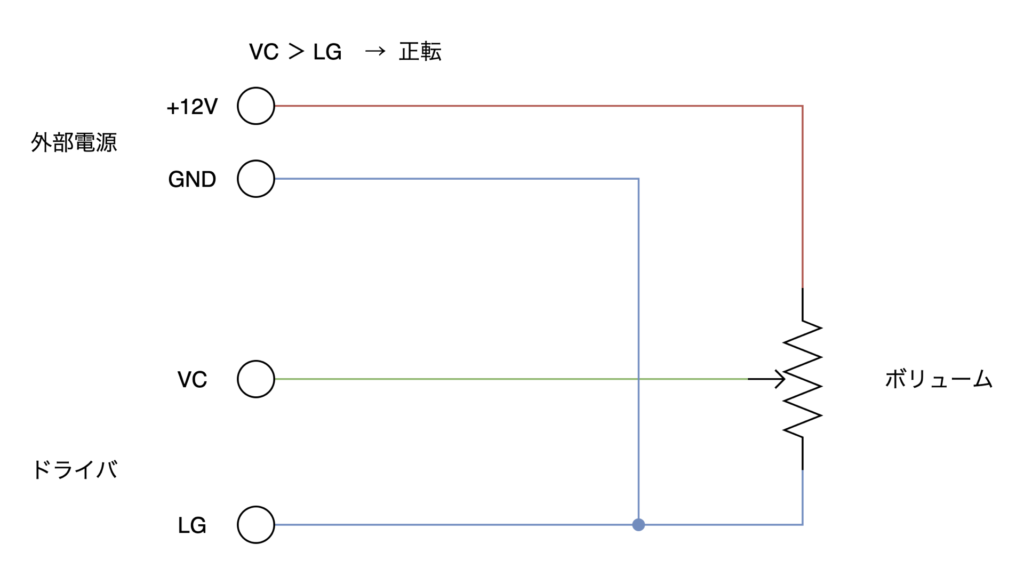
電圧が0Vより大きいときは正転し、0Vより小さいときは逆転します。厳密に言うとLG端子(グランド)より、VC端子(電圧入力)の電圧が大きいか小さいかで回転方向が変わります。
下記の図のようにLG端子よりVC端子が大きければ正転方向に回転します。
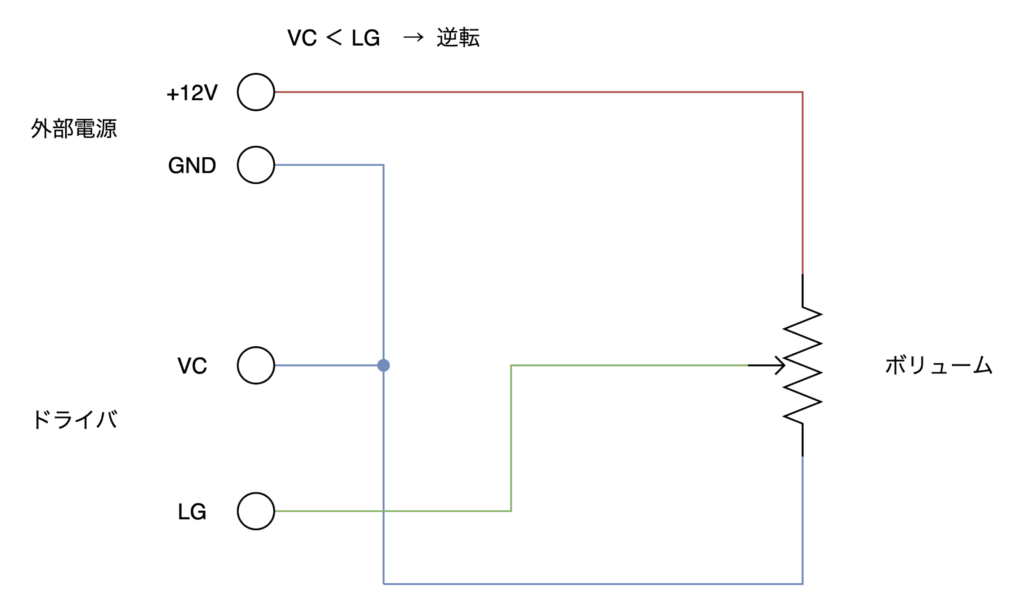
また、下記図のようにLG端子よりVC端子が小さければ正転方向に回転します。
さて今回使用するドライバは、サーボドライバ内にボリューム駆動用の電源が搭載しているタイプでした。そこで同じような考えで回路を組んだら、逆転方向が動作しませんでした。
動作しない理由
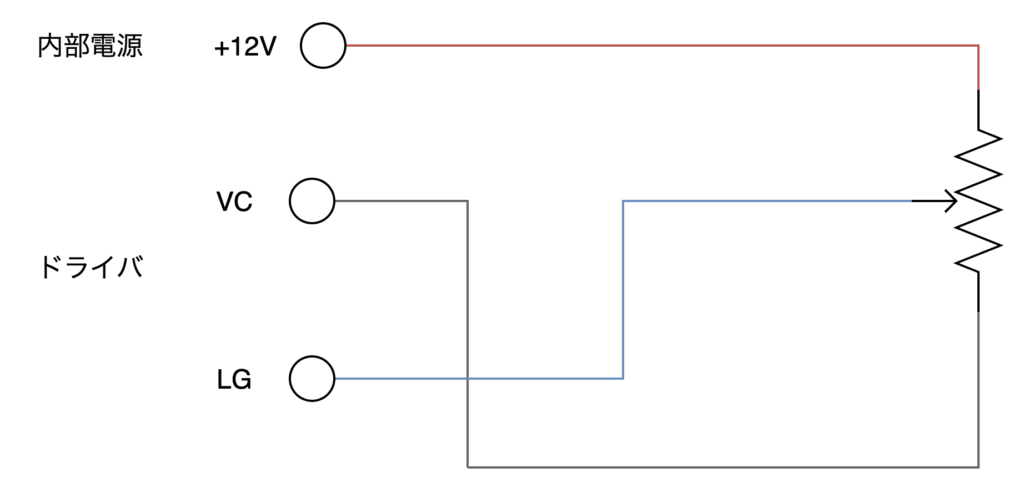
この回路ではVCとLGが同電位になってしまいます。LGを+12Vに接続するわけにもいきません。(ショートしてしまうので)
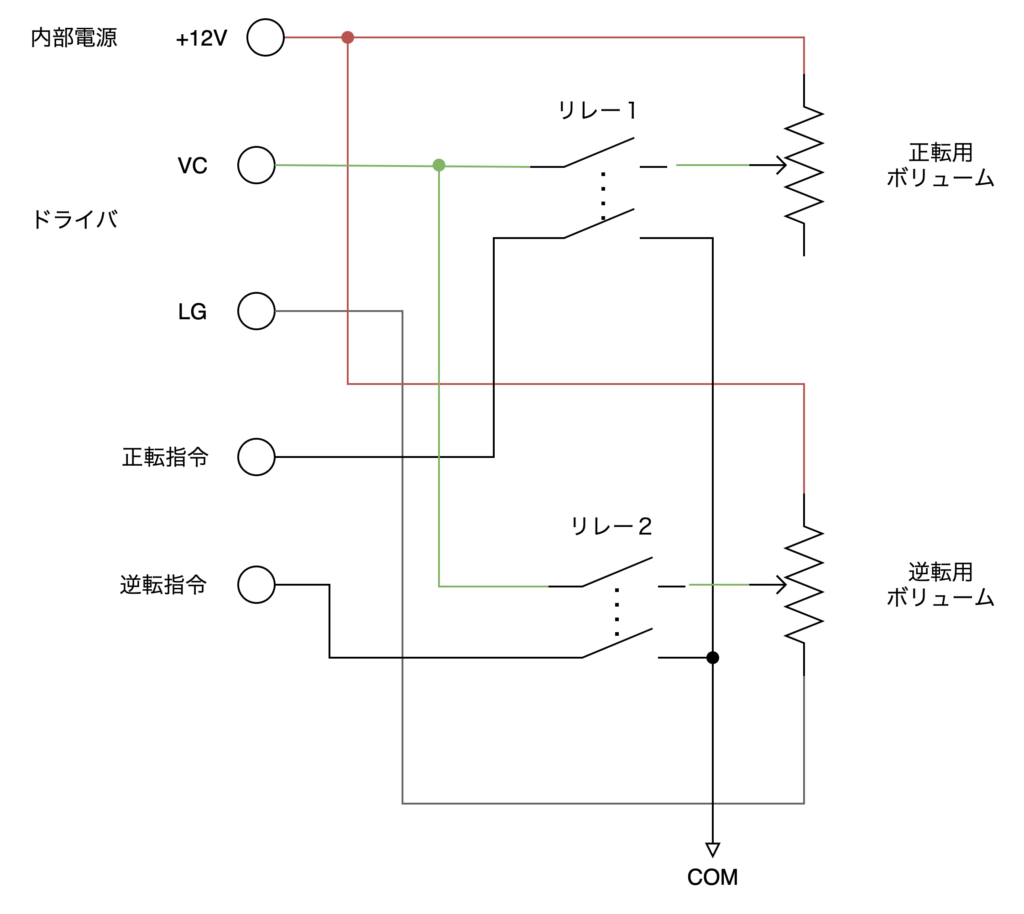
解決策
ボリュームにドライバ内部電源の0〜12Vをかけて、ボリュームと指令信号1/2をを切り替えるようにしました。